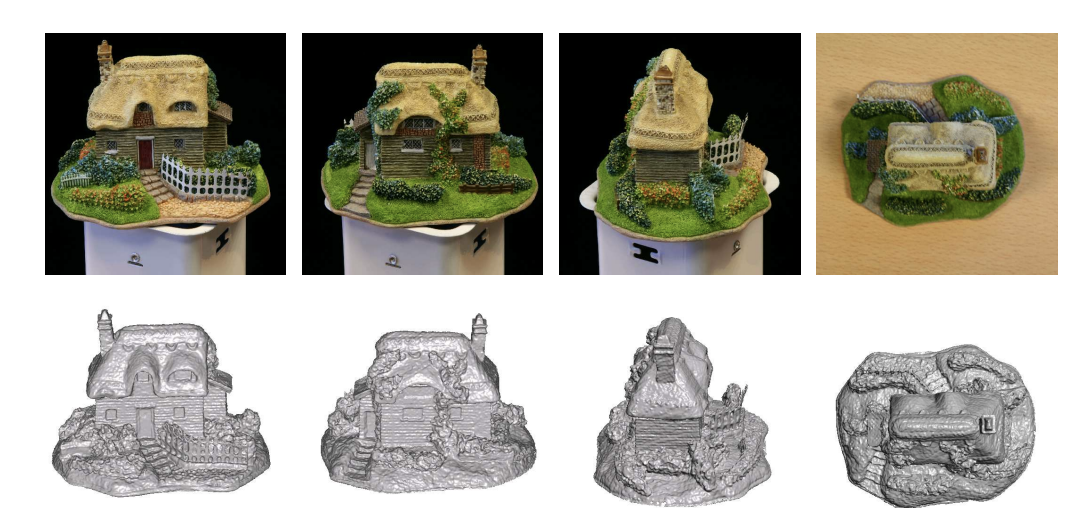
This project develops methods for recovering dense, accurate three-dimensional geometry from collections of ordinary photographs. A central thread is the formulation of multi-view reconstruction as a global optimisation: scene recovery is cast as a volumetric partition of space into “object” and “empty” regions that can be solved efficiently with graph cuts. A photo-consistency term pulls the surface towards locations supported by the images, while visual-hull and ballooning constraints regularise the solution, and a probabilistic treatment of visibility handles the occlusions and concavities that defeat simpler foreground models.
Alongside these volumetric approaches, the project has explored Markov Random Field formulations that generalise stereo from image-based depth maps to height (relief) fields defined over arbitrary base surfaces, Bayesian structure-from-motion with explicit smoothness priors, and automatic object/background segmentation driven by camera pose and fixation rather than manual labelling. Applications have ranged from the detailed digitisation of museum artifacts and shiny, textureless objects to interactive, GPU-accelerated systems that capture, recognise and register 3D shape in seconds.
To support rigorous, reproducible evaluation, the project also contributed a large-scale multi-view stereo benchmark — an order of magnitude larger and more diverse than earlier reference datasets — to help drive and measure progress across the field.